[Bricolage] Mesure d'angle et compagnie
#HDJ
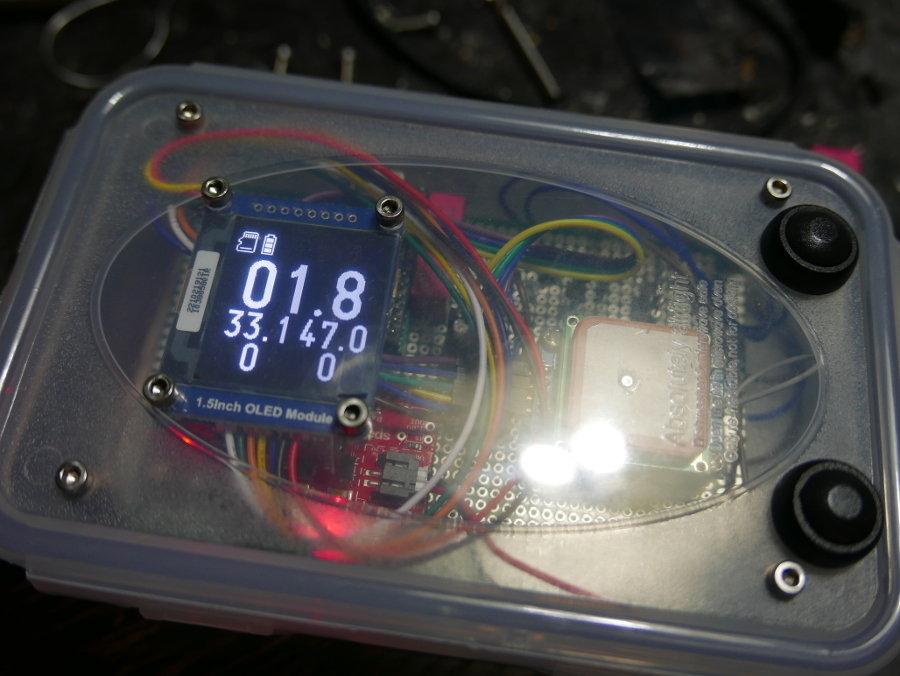
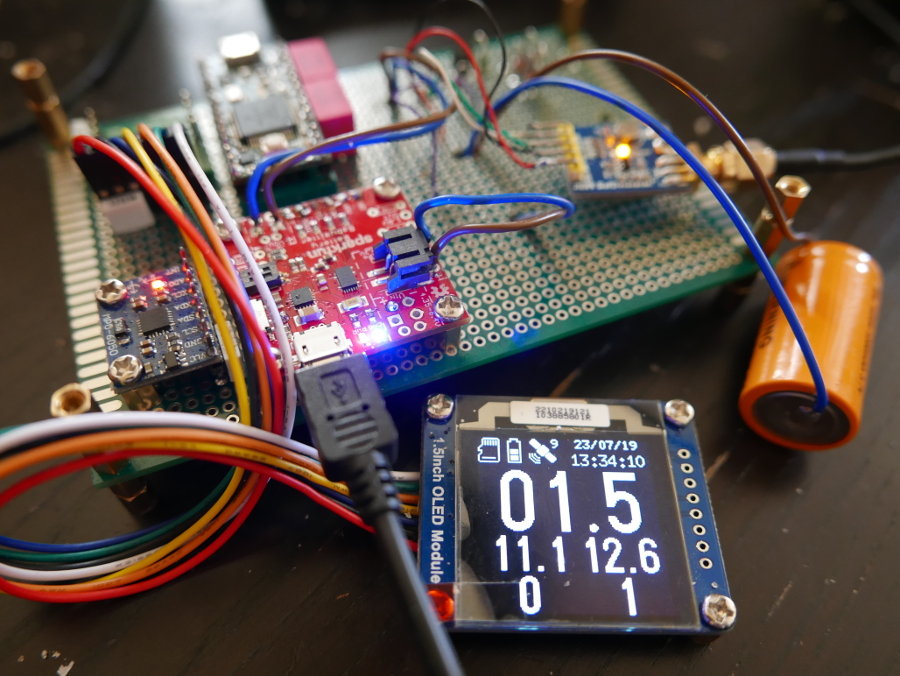
Ca continue à me chiffonner. Et comme je ne voudrais pas découvrir que j'étais aux limites en me retrouvant le cul au sol, je vais essayer de faire autrement. Avec un data logger, pour mesurer ce qui se passe, l'angle, angle max droite/gauche, et puis tant qu'à faire, vitesse et d'autres choses.
Pour le moment, c'est pas gagné. Au cours de premiers tests, l'écriture sur la carte SD (bruit sur le bus SPI) me pourrissait la réception GPS. Maintenant, avec cet autre proto, c'est la lecture de l'accéléromètre (bruit sur le bus I2C) qui me pourrit le signal GPS...
Ca existe tout fait, ce genre de trucs, et qui ne soit pas trop cher?
Un U solide sur la moto et ça pourrait suivre?
snowride a écrit:Sachant que tu as des pneus qui décrochent progressivement et d'autres qui décrochent sans prévenir ça dépend des modèlesMiwik a écrit:shijo a écrit:Sur une moto sans tétons aux cale pieds, on devine comment qu'on va un peu trop loin?
Si t'as rien qui peut frotter, les pneus devraient te prevenir en commencant a glisser

Ca continue à me chiffonner. Et comme je ne voudrais pas découvrir que j'étais aux limites en me retrouvant le cul au sol, je vais essayer de faire autrement. Avec un data logger, pour mesurer ce qui se passe, l'angle, angle max droite/gauche, et puis tant qu'à faire, vitesse et d'autres choses.
Pour le moment, c'est pas gagné. Au cours de premiers tests, l'écriture sur la carte SD (bruit sur le bus SPI) me pourrissait la réception GPS. Maintenant, avec cet autre proto, c'est la lecture de l'accéléromètre (bruit sur le bus I2C) qui me pourrit le signal GPS...
Ca existe tout fait, ce genre de trucs, et qui ne soit pas trop cher?
Miwik a écrit:Echtélion a écrit:Je compatis...
La , tu n'as plus qu'à attendre un miracle....
Qu'il la quitte ?

Un U solide sur la moto et ça pourrait suivre?